Comment choisir un matériau de circuit pour différents types d'applications de capteurs radar dans les systèmes avancés d'aide à la conduite automobile (Adas)
Un jour dans le futur, les voitures autonomes seront probablement plus sûres que les véhicules actuellement conduits par leurs conducteurs. Mais avant que le conducteur ne commence à desserrer le volant, certains composants fonctionnels électroniques doivent devenir standard dans les véhicules commerciaux, notamment un système radar à ondes millimétriques, une caméra et / ou un lidar. Divers matériaux de circuit sont nécessaires. Par rapport à la route, les radars semblent plus faciles à associer au champ de bataille. Mais il est en train de devenir une technologie de capteur très fiable dans le cadre de la technologie Adas (Advanced Driver Assistance System) dans les voitures modernes, offrant des fonctionnalités de sécurité électronique aux véhicules commerciaux modernes. Le système radar à ondes millimétriques est une technologie bien établie dans l'industrie automobile. Premier système d'assistance au freinage à fonction de sécurité active, il est utilisé par Mercedes - Benz depuis 1996 et est couramment utilisé dans les systèmes Adas modernes. Détection des angles morts et protection contre les collisions.
Les radars à ondes millimétriques aideront les voitures autonomes à devenir possibles, mais ils nécessitent une combinaison d'éléments, y compris des matériaux de circuit qui peuvent fournir des performances stables pour l'électronique et les circuits électriques à des fréquences supérieures à 77 GHz. Par exemple, dans les applications Adas, les matériaux de circuit nécessitent la conception de lignes de transmission capables de supporter des signaux micro - ondes et millimétriques à 24,77 (ou 79) GHz pour des pertes minimales tout en offrant des performances reproductibles constantes sur une large plage de températures de fonctionnement. Heureusement, Rogers peut fournir à ce matériau de circuit les performances constantes requises pour les applications Adas allant des micro - ondes aux bandes d'ondes millimétriques à haute fréquence.
Le système radar embarqué sera utilisé avec d'autres technologies dans le cadre de la protection électronique du système Adas du véhicule. Le système radar envoie des signaux électromagnétiques (EM) sous forme d'ondes radio et reçoit les signaux réfléchis des ondes radio d'une cible qui est généralement plusieurs cibles, comme une autre voiture. Le système radar peut extraire de ces signaux réfléchis reçus les informations correspondantes sur la cible, y compris sa position, sa distance, sa vitesse relative et sa section Radar (RCS). La plage (R) peut être déterminée à partir de la vitesse de la lumière (c) et du temps aller - retour (i) requis par le signal. Le temps aller - retour est le temps pendant lequel une onde radio se propage de la source d'énergie Radar (émetteur radar) à la cible, puis retourne à la source d'énergie radar. Dans un système radar embarqué, l'apparition du signal radar est transmise à l'antenne PCB. La valeur de R peut être obtenue par une formule mathématique simple: le produit de la vitesse de la lumière et du temps de transit aller - retour de la source du signal radar à la cible et retour à la source radar est divisé par 2: r = cÍ / 2.
Dans le cadre de la sécurité active Adas, le véhicule est équipé de divers capteurs, notamment une caméra, un lidar et un système radar.
Figure 1: dans le cadre de la sécurité active Adas, le véhicule est équipé de divers capteurs, dont une caméra, un lidar et un système radar.
Lorsque plusieurs cibles radar sont relativement proches, par example deux véhicules sur une route encombrée, une résolution de distance Radar précise est nécessaire pour distinguer les cibles détectées. Des impulsions radar plus courtes peuvent être utilisées pour détecter une cible, bien que des impulsions plus courtes ou tout type de signal réfléchissent moins d'énergie de la cible vers le récepteur radar. En utilisant la compression d'impulsion, plus d'énergie peut être ajoutée à des impulsions plus courtes, où la modulation de phase ou de fréquence peut augmenter leur niveau de puissance. Ainsi, les radars basés sur des signaux FM à ondes continues (FMCW), également appelés signaux « FM linéaires », sont couramment utilisés dans les systèmes radar de véhicules.
L'estimation de la vitesse de la cible peut être réalisée par effet Doppler, qui fait référence à la variation de fréquence du signal réfléchi par la cible obtenue à partir du radar en fonction du déplacement de la cible par rapport à l'émetteur / récepteur radar. Le décalage Doppler est inversement proportionnel à la longueur d'onde: sa valeur est positive ou négative selon que la cible radar est proche ou éloignée de la source radar.
Un système radar FMCW ou linéaire peut mesurer la vitesse, la distance et l'angle de plusieurs cibles. Bien que les radars FMCW à bande étroite (Nb) et à très large bande (UWB) Fonctionnant à 24 GHz soient déjà largement utilisés, l'application de cette bande diminue progressivement. Les systèmes radar à bande étroite de 77 GHz avec une bande passante de 1 GHz sont de plus en plus utilisés dans les systèmes de sécurité des véhicules. En outre, l'industrie automobile étudie le radar UWB 79 GHz pour les applications futures. Les radars à ondes continues sont relativement simples et peuvent détecter la vitesse d'une cible, mais pas sa distance. Un radar à ondes continues pulsées peut également utiliser plusieurs fréquences Doppler pour estimer la distance. La durée des impulsions et la fréquence de répétition des impulsions sont deux paramètres clés pour la conception de systèmes radar à ondes continues pulsées fiables.
En raison de la compression des impulsions, la résolution en distance du radar FMCW est inversement proportionnelle à la largeur de bande du signal FMCW, indépendamment de la largeur des impulsions. Le radar FMCW à courte portée mesure de petites distances à haute résolution en utilisant des formes d'onde UWB. La résolution Doppler est fonction de la largeur de l'impulsion et du nombre d'impulsions utilisées pour l'estimation. Le fouillis dans tout système radar est le bruit généré par les signaux radar réfléchis par des objets autres que la cible d'intérêt. Dans tout système radar, le radar doit identifier une cible efficace parmi les nombreux objets éclairés par le signal radar par rapport aux autres objets environnants.
Le système de sécurité électronique embarqué utilise d'autres paramètres physiques, tels que la vision et la lumière, pour fournir des données utilisables au Contrôleur de domaine Adas du véhicule. Un contrôleur de domaine est un centre de traitement de l'information qui effectue la fusion des informations des capteurs pour aider à guider le véhicule en toute sécurité. La caméra avant est utilisée pour l'avertissement de sortie de voie et l'imagerie de détection d'objets, tandis que la caméra arrière peut fournir une imagerie inversée et supplémentaire au besoin. Les systèmes de détection et de télémétrie de la lumière (lidar, lidar) transmettent des impulsions lumineuses infrarouges (IR) à une cible (par exemple, un mur dans un autre véhicule ou un parking) et détectent les impulsions IR qui reviennent à la source lumineuse en fonction de la propagation de la lumière. La vitesse est utilisée Pour calculer la distance entre la source lumineuse et la cible. En utilisant des paramètres détaillés tels que la longueur et la longueur d'onde de l'impulsion IR et le temps nécessaire pour réfléchir et retourner au détecteur / récepteur IR dans le véhicule, il est possible de calculer la position et le mouvement relatif de l'objet illuminé par Ir. Malheureusement, les performances et l'efficacité des systèmes lidar embarqués sont extrêmement vulnérables aux conditions environnementales difficiles telles que la neige, la pluie et le brouillard.
Un système radar embarqué peut fonctionner à la manière d'un système lidar, mais les longueurs d'onde correspondantes des radars à des fréquences d'ondes millimétriques sont plus petites. Les Radars Embarqués sont spécifiés pour certaines gammes de fréquences spécifiques, par exemple 24, 77 et 79 GHz. Ces bandes de fréquences ont été approuvées pour utilisation par un certain nombre d'organismes de normalisation, tels que la Federal Communications Commission des États - Unis et l'Institut européen des normes de télécommunications.
 7bbab2ef32f57d3b5c953.png")
Actuellement, divers radars sont utilisés dans le cadre d'applications Adas et les signaux FMCW sont largement utilisés pour leur efficacité dans la mesure de la vitesse, de la distance et de l'angle de plusieurs cibles. Les radars automobiles sont parfois conçus à l'aide de bandes étroites NB et ultra - large bande UWB fonctionnant dans la bande de 24 GHz. Les radars embarqués à bande étroite de 24 GHz occupent la plage de 200 MHz de 24,05 à 24,25 GHz, et les radars ultra large bande de 24 GHz ont une bande passante totale de 5 GHz, de 21,65 GHz à 26,65 GHz. Les systèmes radar embarqués à bande étroite de 24 GHz peuvent fournir une détection efficace des cibles de trafic à courte distance pour des fonctions simples telles que la détection des angles morts. Les systèmes radar ultra - large bande pour véhicules ont été appliqués à des fonctions à plus haute résolution de distance, telles que le régulateur de vitesse adaptatif (ACC), l'avertissement de collision avant (FCW) et le système de freinage d'urgence automatique (AEB).
Cependant, alors que les applications mondiales de télécommunications mobiles continuent de consommer le spectre des fréquences « inférieures» (y compris les accessoires 24 GHz), les fréquences des systèmes radar embarqués deviennent plus élevées et le spectre des ondes millimétriques disponible pour les longueurs d’onde plus courtes devient le choix, avec des fréquences de 77 et 79 GHz, respectivement. En fait, le Japon n'utilise plus la technologie de Radar embarqué ultra large bande 24 GHz. Il sera progressivement éliminé en Europe et aux États - Unis au profit de radars embarqués à bande étroite à 77 GHz et à très large bande à 79 GHz, plus haute fréquence, selon un calendrier établi respectivement par les organismes régionaux de normalisation ETSI et FCC. Les radars 77 GHz et 79 GHz seront utilisés sous une forme ou une autre comme modules fonctionnels pour les voitures autonomes.
Exigences matérielles
Les voitures autonomes utiliseront de nombreuses technologies électroniques différentes pour assurer le guidage, le contrôle et la sécurité, y compris des capteurs utilisant la lumière et les ondes électromagnétiques. La gamme de fréquences de signal et la technologie de circuit largement utilisée par les radars à ondes millimétriques étaient autrefois considérées comme uniques, expérimentales et même utilisées uniquement à des fins militaires. L'utilisation accrue des radars à ondes millimétriques est une tendance à l'intégration d'un nombre croissant de technologies et de circuits électroniques dans les véhicules automobiles, offrant commodité et soutien aux conducteurs, rendant les véhicules plus sûrs et permettant aux propriétaires et aux opérateurs d'éviter de conduire des véhicules. Libéré de la « mission ». L'utilisation de l'électronique à haute fréquence dans les véhicules commerciaux peut même déclencher de nouvelles façons entre le conducteur et le véhicule. À tout le moins, l'utilisation de technologies telles que les radars à ondes millimétriques modifierait la définition de « conduire» un véhicule automobile.
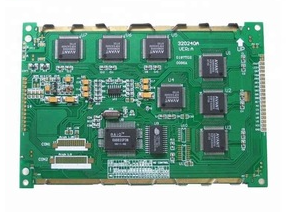
La conception de ces systèmes radar embarqués à ondes millimétriques commence généralement par une antenne, généralement une antenne à circuit imprimé (PCB) haute performance, installée à différents endroits pour détecter ou « éclairer» une cible en émettant et en recevant des signaux à ondes millimétriques de faible puissance. Le radar et les autres systèmes électroniques du véhicule utilisent différentes méthodes pour fournir des informations sur l'environnement du véhicule à utiliser par les algorithmes de détection et de classification des objets autour du véhicule.
Le signal du radar embarqué peut se présenter sous la forme d'une impulsion ou d'une modulation CW. Les systèmes radar embarqués sont utilisés depuis un certain temps pour la détection des angles morts à 24 GHz. Cependant, avec le temps et la concurrence spectrale accrue pour d'autres fonctions telles que les communications sans fil, les systèmes radar embarqués évoluent vers les hautes fréquences et réduisent leur bande passante, par exemple la large bande de 1 GHz centrée sur 77 GHz et la bande de 79 GHz.
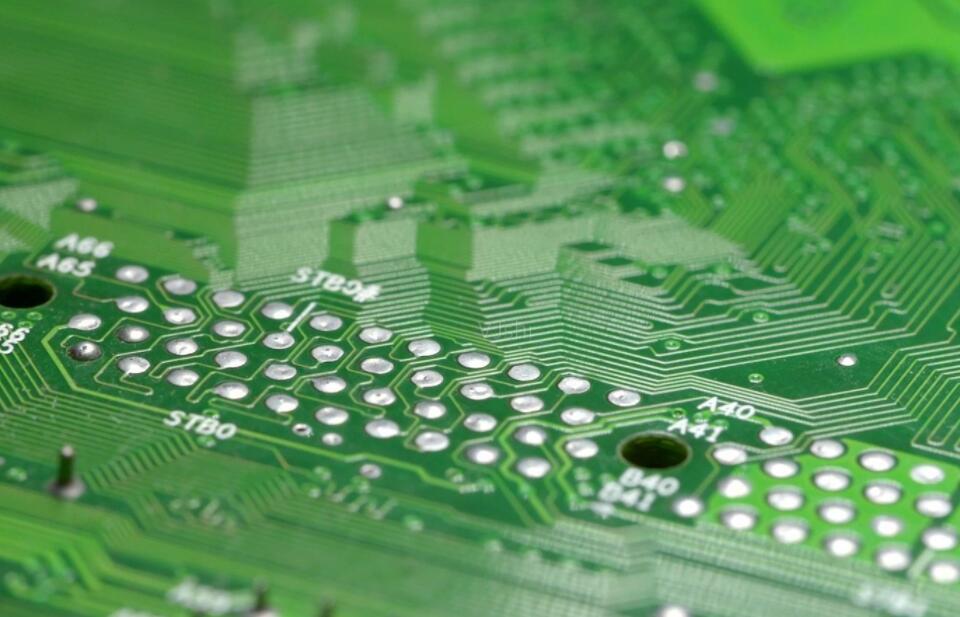
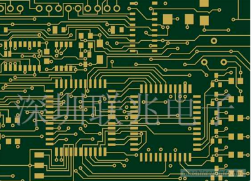
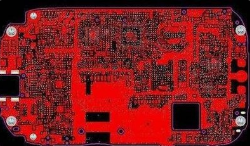
Que ce soit à 24, 77 ou 79 GHz, les performances des antennes PCB sont essentielles pour ces systèmes radar embarqués. Si la cible est un signal réfléchi d'un autre véhicule, ils doivent émettre vers la cible et la recevoir presque immédiatement. Les paramètres de performance clés d'une antenne PCB comprennent le gain, la directivité et l'efficacité. Les matériaux de circuit à faible perte sont essentiels pour obtenir de bonnes performances d'antenne PCB (Figure 2). La fiabilité à long terme des antennes PCB est également très importante, car ces antennes compactes et leurs circuits émetteurs - récepteurs haute fréquence doivent également continuer à fonctionner sans interruption (lorsque le véhicule est en marche) et être capables de fonctionner dans des environnements opérationnels plus difficiles – les véhicules commerciaux fonctionnent de manière fiable sur le dessus.