毫米波雷達是汽車和工業應用的主要傳感方法之一,因為即使在惡劣的環境條件下,它也能以高精度的距離、角度和速度精度檢測幾釐米到幾百米的物體。
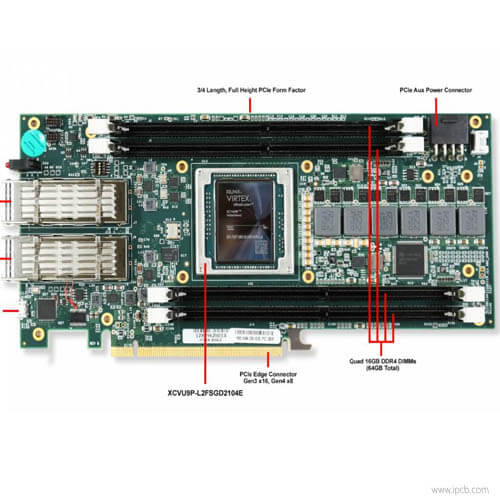
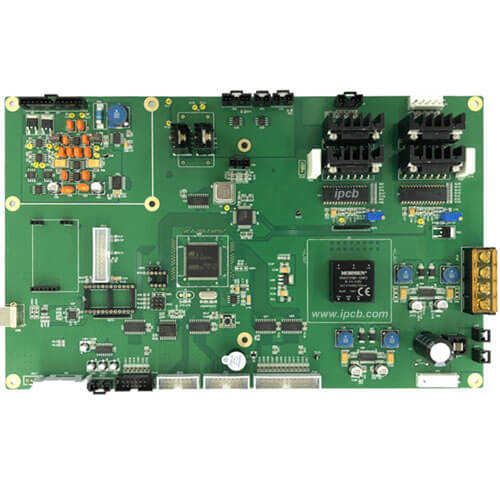
典型的 毫米波雷達PCBA 包括雷達晶片組和其他電子元件, 例如電源管理電路, PCB上組裝的閃存和週邊介面設備. 發射天線和接收天線通常也在PCB上實現, 但要實現高天線效能, 高頻PCB資料, 例如 Rogers RO3003和Isola 370小時, 需要使用.

毫米波雷達的核心部件包括收發器天線(TX和RX)、射頻單元(RF)、模數轉換器(ADC)、數位信號處理器(DSP)、微控制器(MCU)等。射頻、ADC、DSP、MCU等通過CMOS工藝直接集成到一個SOC中。
毫米波雷達主要使用24GHz、60GHz、77GHz和79GHz四個頻帶。 24GHz準確地屬於釐米波。 由於量測距離有限(約60m)和一般分辯率,它通常被設計為一種角度雷達,用於在大視場角範圍內探測近程障礙物。 由於60GHz特別受大氣衰减的影響,它通常被設計為生命體征檢測雷達,用於檢測車輛中的生命體征和人員姿勢。 77GHz和79GHz通常被設計為主雷達,因為它們的量測距離很長(約200米),是向前遠距離感知的强大工具。 這兩個波段也是未來車載毫米波雷達領域的主流波段。
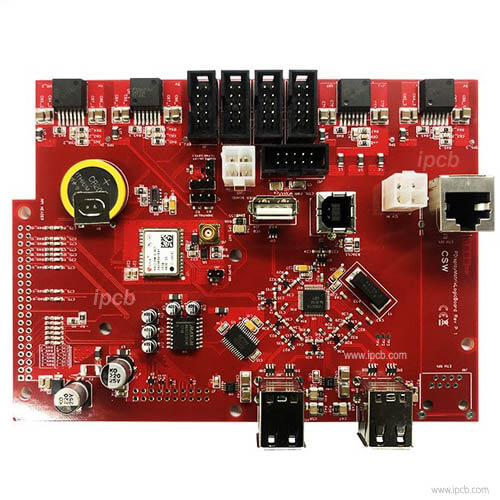
電感、電容、二極體、電源晶片等密集安裝在電源主機板上,主要負責系統電源管理。 每家公司通常會在其上集成一個安全控制器,以提供車輛通信和安全相關功能。
雷達主機板可以說是整個毫米波雷達的覈心,包括天線、射頻、DSP和控制電路板。

毫米波雷達天線PCBA
當天線長度為電磁波長度的1/4時,天線的發射和接收轉換效率最高。 毫米波的波長只有幾毫米,所以天線可以做得很小。 通過使用多個天線組成陣列天線,也可以實現窄波束,而窄波束意味著更高的方位分辯率。
現時,毫米波雷達天線的主流方案是微帶陣列。 最常見的設計是在高頻PCB上集成微帶貼片天線,在雷達主機板上集成高頻PCB。 該方案大大降低了毫米波雷達的成本和體積。
毫米波雷達射頻PCBA
RF負責訊號調製、傳輸、接收和回波訊號解調。 它是毫米波雷達的覈心射頻部分。 現時,主流的解決方案是通過MMIC(單片微波集成電路)科技集成上述內容。 MMIC是一種利用電晶體科技在電晶體襯底上製造無源和有源元件的科技。
在毫米波雷達領域,基於矽鍺科技的MMIC集成功能電路主要包括低雜訊放大器、功率放大器、混頻器、檢測器、調製器、壓控振盪器、移相器、開關等元件。 發射機、接收機和DSP都是獨立的單元,這使得毫米波雷達的設計過程複雜,總體體積相對較大。
隨著COMS科技的發展,MMIC一方面變得更小,另一方面也為其與DSP和MCU的集成提供了科技可行性。 2016年底,TI推出了基於CMOS科技的高度集成77GHz毫米波雷達晶片AWR1642,將前端MMIC、DSP和MCU集成在單個SOC上。在顯著降低毫米波雷達成本的同時,也大大降低了開發難度。
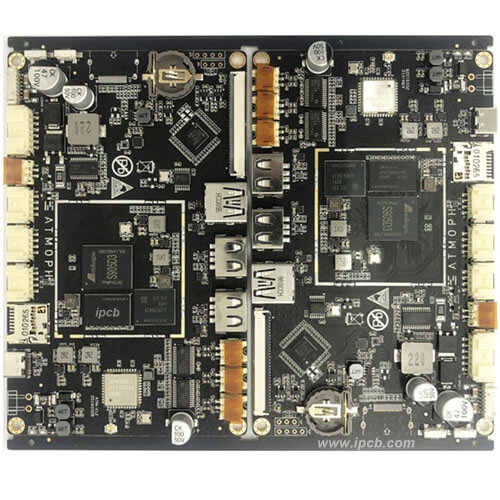
毫米波雷達PCBA的DSP
通過嵌入不同的信號處理算灋,DSP選取從前端採集的中頻訊號,以獲取特定類型的目標資訊。 DSP是毫米波雷達穩定性和可靠性的覈心。
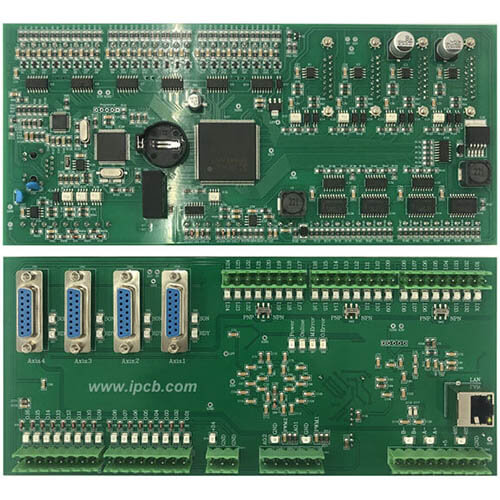
毫米波雷達PCBA控制電路
毫米波雷達控制電路根據DSP輸出的目標資訊和車身動態資訊進行數據融合,最後通過主處理器進行決策處理。
根據輻射電磁波的不同管道,毫米波雷達主要分為兩種類型:脈衝波作業系統和連續波作業系統。
脈衝波科技是指毫米波雷達在短時間內發射峰值功率的短脈衝,基於都卜勒頻率和TOF原理實現目標速度和距離量測,並基於平行接收天線接收到的同一目標反射的脈衝波相位差實現角度量測。 由於其高功率,可以在大雜波背景下檢測遠距離小幅度運動目標。 但它也帶來了成本高、體積大、功耗高等缺點。 現時,在車載毫米波雷達領域很少採用這種方法。
連續波科技也可分為FSK(頻移鍵控,可量測單個目標的距離和速度)、CW(恒頻連續波,只能用於速度量測,不能用於距離量測)和FMCW(調頻連續波)。 其中,調頻連續波由於具有多目標同時檢測、分辯率高、成本低等優點,已成為連續波科技中的一種常用科技。
從毫米波雷達接收天線接收到發射的電磁波後,回波訊號和發射訊號將被送入混頻器進行混合。 當發射訊號遇到被測目標並返回時,回波訊號的頻率與發射訊號相比發生了變化。 混頻器的用途是計算發射訊號和回波訊號之間的頻率差,這稱為中頻訊號。 中頻訊號包含被測目標的距離秘密,經過濾波、放大、模數轉換、頻率量測等後續處理,可以獲得被測目標距離資訊。
對於速度量測,由於被測目標的距離不同,毫米波雷達接收到的回波訊號相位也不同。 對一幀中的所有單個啁啾訊號進行等間隔採樣,並對採樣點處的數據進行傅裡葉變換,然後利用相位差量測被測目標的速度。
對於角度量測,使用多個接收天線接收相同的回波訊號,並計算回波訊號之間的相位差以實現角度量測。

三維毫米波雷達
毫米波雷達只能輸出距離、速度和角度資訊,也稱為三維毫米波雷達。 這個距離D和角度是在平面極坐標系中安裝雷達的自駕車輛的數據。 通過將極坐標系轉換為笛卡爾坐標系,我們可以獲得目標車輛在x和y方向上與自駕車輛之間的距離。 此時,您是否發現尺寸的z方向的距離缺失。 這也是受到責備的3D毫米波雷達的缺點之一。
然而,這個缺點對靜態對象來說是致命的。 道路中間的人孔蓋、減速帶、懸掛在空中的各種標誌、高架結構、靜止車輛等無法通過三維毫米波雷達確定這些障礙物是否由於缺乏高度資訊而影響交通。 對於靜態對象,製造商簡單而粗糙,要麼直接忽略,要麼大大降低了信心。 這也是特斯拉早期事故的原因之一。 攝像機沒有識別墜落的白色貨車,毫米波雷達識別了。 然而,決策信心過低,導致車輛未觸發自動緊急自動功能。
4D毫米波雷達
4D毫米波雷達最顯著的特點是能够準確地檢測俯仰角,從而獲得被測目標的真實高度數據,即在笛卡爾坐標系中目標物體在z軸方向上的距離。 有了這項功能,4D毫米波雷達可以識別靜止物體,並新增了最短的一塊木頭。 此外,4D毫米波雷達的分辯率也有了很大提高。 其水准和垂直分辯率分別為1°和2°,水准分辯率是普通三維毫米波雷達的5-10倍。
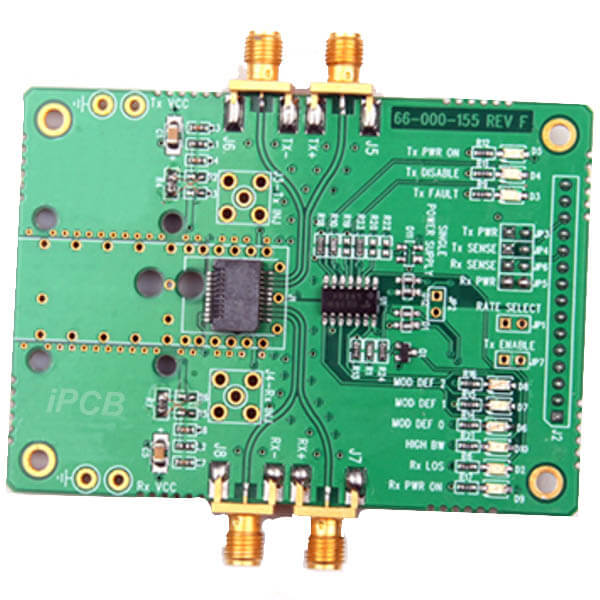
毫米波雷達PCBA
PCB層:4-6層
基底:RO3003+Isola 370HR
PCB表面處理:浸銀
PCB銅厚度:1盎司
PCB顏色:綠色、黑色、白色、紅色、藍色
PCB測試:是
晶片:德州儀器IWR1843BOOST
PCBA測試:否
應用:毫米波雷達
76GHz至81GHz FMCW毫米波感測器
對於PCB技術問題,iPCB專業的支持團隊將幫助您完成每一步。 您也可以在這裡請求 電路板 相關的技術咨詢或快速報價請求。 亦可通過電子郵件聯絡 sales@ipcb.com
我們將迅速回復您。