Viene studiato un sistema di rilevamento ottico automatico ad alta precisione, su larga scala, veloce e in tempo reale per i difetti della scheda PCB e la struttura hardware e il sistema software sono progettati rispettivamente. Il sistema è composto principalmente da una piattaforma bidimensionale di movimento, modulo di controllo motore, modulo di acquisizione di immagini, modulo di elaborazione di immagini e risultato nel modulo di analisi. La modalità di azionamento del motore passo passo migliorata, l'azionamento di suddivisione e l'algoritmo di riconoscimento delle immagini migliorato garantiscono l'accuratezza del sistema e la progettazione del rilevamento automatico a un pulsante migliora la velocità di rilevamento. I risultati sperimentali mostrano che il sistema può rilevare rapidamente e con precisione i difetti sulla scheda PCB e ha determinati valori pratici e di sviluppo.
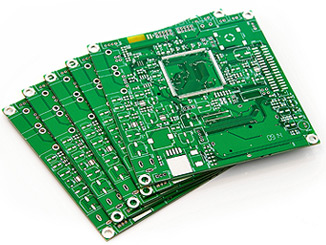
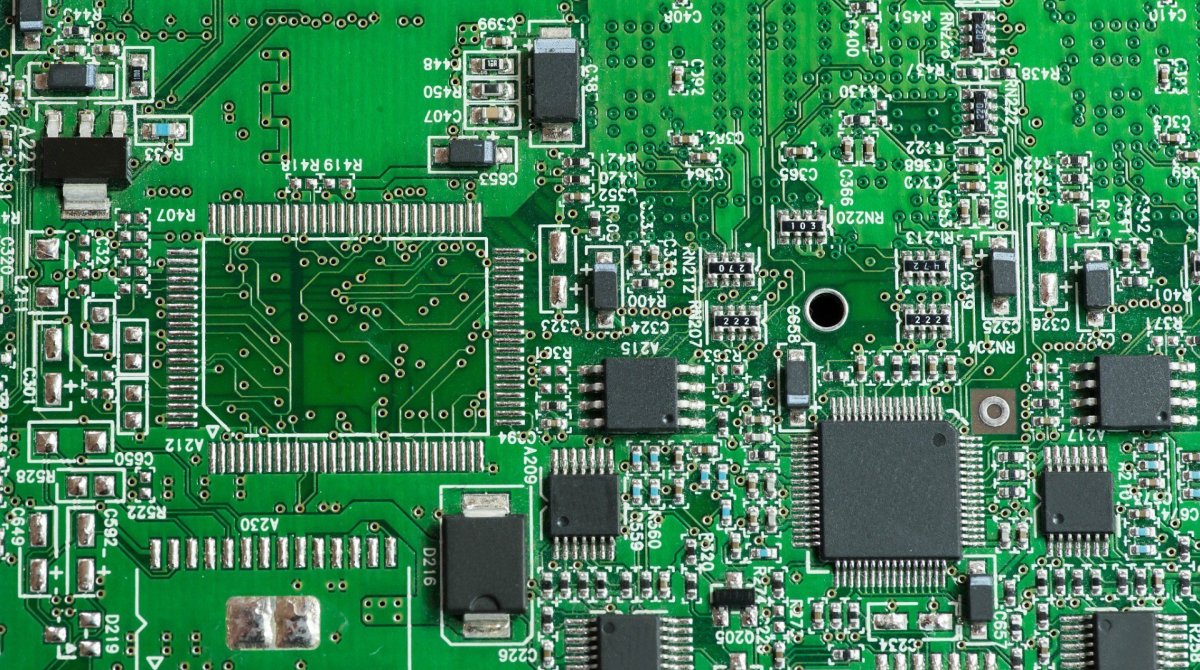
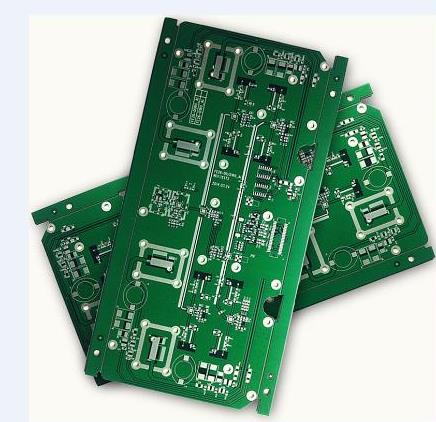
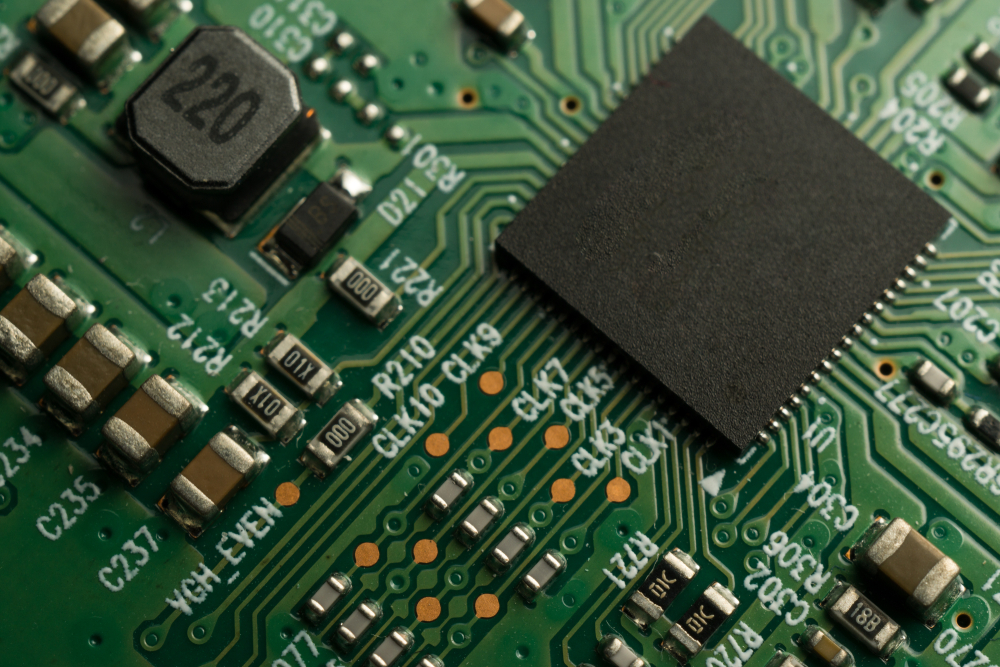
La parte dei prodotti elettronici, i circuiti stampati, è un supporto informativo che integra vari componenti elettronici. È stato ampiamente utilizzato in vari campi ed è una parte indispensabile dei prodotti elettronici. La qualità della scheda PCB è diventata il fattore determinante per il lavoro a lungo termine, normale e affidabile dei prodotti elettronici. Con lo sviluppo della scienza e della tecnologia, la tendenza di sviluppo di alta densità, alta complessità e alte prestazioni dei prodotti di schede PCB continua a sfidare l'ispezione di qualità delle schede PCB.
A causa di fattori quali l'accesso limitato, l'alto costo e la bassa efficienza, i metodi tradizionali di rilevamento dei difetti PCB non sono gradualmente riusciti a soddisfare le esigenze di rilevamento moderno. Pertanto, è di grande valore accademico ed economico studiare e implementare un sistema di rilevamento automatico per i difetti PCB. Tra le tecnologie di rilevamento dei difetti della scheda PCB ricercate in patria e all'estero, la tecnologia AOI (Automatic Optic Inspection) ha ricevuto sempre più attenzione e il metodo di rilevamento basato sull'elaborazione delle immagini è diventato anche il mainstream dell'ispezione ottica automatica. In questo documento, un ampio campo visivo, alta precisione, un rapido sistema di rilevamento automatico in tempo reale per i difetti della scheda PCB sono studiati attraverso la tecnologia di elaborazione delle immagini e sono progettati la struttura hardware e il flusso dell'algoritmo software. Attraverso la modalità di azionamento del motore migliorata e la progettazione del software di rilevamento automatico a un pulsante, la velocità di rilevamento del sistema è notevolmente migliorata e il miglioramento dell'algoritmo di identificazione dei difetti del modulo di analisi dei risultati migliora l'accuratezza dei risultati di rilevamento.

1. struttura di sistema Il sistema di rilevamento automatico dei difetti della scheda PCB è composto principalmente da un modulo di controllo del movimento, un modulo di acquisizione di immagini, un modulo di elaborazione di immagini e un modulo di analisi dei risultati. Il processo di lavoro del sistema è il seguente: il computer superiore controlla il movimento del motore passo-passo, il motore passo-passo guida il movimento della piattaforma bidimensionale, trasmette la telecamera CCD alla parte superiore del PCB da rilevare e raccoglie immagini di grandi scene sul PCB e le immagini raccolte vengono inviate alla scheda di acquisizione di immagini. Al computer host, il software del computer host esegue la cucitura e la preelaborazione delle immagini sulle immagini raccolte, localizza e calibra accuratamente le immagini elaborate, esegue la corrispondenza dei modelli e il riconoscimento delle immagini attraverso la segmentazione dell'immagine, l'elaborazione morfologica dell'immagine, ecc., e ottiene risultati di rilevamento dei difetti. La progettazione del sistema include la progettazione hardware e software. Software di sistema e hardware lavorano in coordinamento tra loro per formare un insieme.2. Progettazione hardware di sistemoLa progettazione hardware del sistema di rilevamento automatico dei difetti della scheda PCB comprende principalmente una piattaforma di movimento bidimensionale, una scheda di controllo del movimento del motore, una scheda di azionamento del motore, una telecamera CCD, una scheda di acquisizione di immagini e un PC.
2.1 Macchina fotografica CCD e frame grabberI principali parametri caratteristici della fotocamera CCD includono formato della fotocamera, dimensione della superficie fotosensibile, dimensione dei pixel, risoluzione, velocità dell'otturatore elettronico, metodo del sistema di sincronizzazione, illuminazione, sensibilità, rapporto segnale-rumore, ecc Il formato della fotocamera e il rilevamento online determinano la frequenza di campionamento della scheda di acquisizione dell'immagine. Il bilanciamento delle dimensioni della superficie fotosensibile, delle dimensioni dei pixel, della risoluzione e dell'ingrandimento del sistema di lenti per immagini dipende dalla gamma di misura e dalla precisione di misura. Tenendo conto dei fattori di cui sopra e dei requisiti di sistema, i frame grabber, noti anche come schede di acquisizione video, sono un tipo di scheda video. La funzione principale della scheda di acquisizione frame è quella di convertire il segnale video analogico continuo della fotocamera in quantità digitali discrete. Il suo principio di base: i segnali di uscita video di vari formati in uscita dalla fotocamera sono elaborati dal modulo di selezione dell'ingresso per formare un segnale video che può essere riconosciuto dalla scheda di acquisizione immagine. Dopo che il segnale video analogico è convertito, viene memorizzato nella memoria buffer frame sulla scheda e la trasmissione di immagine specifica è controllata dalla CPU del computer attraverso il bus del computer e infine memorizzata nella memoria del computer o disco rigido per l'elaborazione delle immagini. Il modello della scheda di acquisizione dell'immagine utilizzata in questo disegno è NV7004-N, che converte il segnale analogico della fotocamera CCD in un segnale digitale e lo trasmette al computer host per la visualizzazione in tempo reale e può completare la funzione di acquisizione dell'immagine.
2.2 Regolatore di movimento del motore e piattaforma di movimento 2D di precisione Il regolatore di movimento del sistema di rilevamento automatico dei difetti della scheda PCB è una scheda di controllo MCU auto-progettata, il chip è il singolo chip AT89S52 prodotto dalla società ATMEL e la scheda di controllo comunica con il computer ospite attraverso l'interfaccia di comunicazione seriale RS-232. Invia i comandi alla scheda di controllo azionando l'interfaccia uomo-macchina e la scheda di controllo emette segnali di controllo e segnali di onda quadrata di varie frequenze alla scheda del driver del motore passo passo per controllare la velocità, la direzione e la distanza di movimento del motore passo passo. La piattaforma bidimensionale di movimento è costruita da due binari di guida di movimento di precisione prodotti dal Giappone SUS Corp. La rotaia di guida di movimento è un tipo di vite a sfera, che è molto preciso e ha un piccolo errore. Il motore passo-passo è collegato con la guida mobile per guidare il movimento della guida. Il motore passo-passo è un motore passo-passo ibrido bifase a quattro fili prodotto da TAMAGAWA, Giappone. Questo tipo di motore passo-passo funziona stabilmente e ha basso rumore.
2.3 MotoriInfatti, la guida del motore passo-passo è di controllare la corrente degli avvolgimenti di eccitazione di ogni fase del motore passo-passo, in modo che la direzione di sintesi del campo magnetico interno del motore passo-passo cambia, in modo che il motore passo-passo ruota. La magnitudine del vettore di campo magnetico sintetico generato dalla corrente di ogni avvolgimento di eccitazione di fase determina la coppia di rotazione del motore passo e l'angolo incluso tra due vettori di campo magnetico sintetico adiacenti determina l'angolo di passo. Due concetti importanti dei motori passo passo sono introdotti qui: angolo di passo θz e angolo passo θn. L'angolo di passo del motore passo si riferisce all'angolo tra due campi magnetici stabili adiacenti quando il motore passo è in funzione. L'angolo di passo si riferisce allo spostamento angolare che il rotore del motore passo-passo ruota corrispondente a un segnale di impulso.
L'angolo di passo non è solo correlato al numero di denti del motore, ma anche al numero di battiti del motore. L'angolo di passo θ z e l'angolo di passo θ n del motore passo possono essere espressi come: La suddivisione del motore passo passo si basa sulla simmetria ideale di ogni avvolgimento di fase del motore passo e sulla rigorosa rotazione positiva delle caratteristiche dell'angolo passo. La grandezza e il rapporto della corrente negli avvolgimenti riducono l'angolo di passo ad una frazione a pochi centesimi dell'originale, migliorando così la risoluzione del motore passo-passo. Prendendo un motore passo bifase come esempio, se il numero di denti del motore è 50 e il numero di battiti in esecuzione è la modalità single-four beat, l'angolo di passo è θ= 360 gradi (50*4)=1,8 gradi (comunemente noto come passo completo), otto Quando si scatta, l'angolo di passo è θ= 360 gradi/(50*8)=0,9 gradi (comunemente noto come mezzo passo 0. Rispetto alla modalità a quattro battiti, l'angolo di gradino θn è raddoppiato, realizzando l'angolo di gradino La seconda suddivisione. A condizione di un certo numero di battiti, più il numero di denti, più piccolo è l'angolo di passo, ma a causa della limitazione del processo di fabbricazione, il numero di denti non può essere fatto molto, quindi l'angolo di passo del motore passo-passo non può essere molto grande.
L'angolo di passo può anche essere modificato modificando il numero di battiti del motore passo-passo. Il numero di battiti si riferisce al numero di impulsi o stati di conduzione necessari per completare un cambiamento periodico del campo magnetico o al numero di impulsi necessari per la rotazione del motore attraverso un angolo di passo. Quando viene determinato il numero di fasi del motore, viene determinato anche il numero di battiti. Aumentando il numero di denti e fasi del motore passo per ridurre l'angolo di passo, il grado di riduzione dell'angolo di passo è molto limitato ed è difficile soddisfare i requisiti della produzione. Il metodo comunemente usato per la guida di suddivisione del motore è il metodo di rotazione uniforme dell'ampiezza costante del vettore corrente. Il metodo di rotazione uniforme di ampiezza costante del vettore corrente può rendere uniforme l'angolo di passo dopo suddivisione e costante della coppia di uscita.
Il metodo specifico è quello di farli passare attraverso la differenza di fase rispettivamente. Se la corrente sinusoidale è 2Ï/m e l'ampiezza è uguale, il vettore combinato corrente o il vettore del campo magnetico girerà nello spazio e l'ampiezza del vettore combinato rimarrà invariata. Ad esempio, per il motore passo ibrido quadrifase, gli avvolgimenti di fase sono forniti rispettivamente con correnti sinusoidali con una differenza di fase di Ï/2 e uguale ampiezza. Per ottenere il più possibile un campo magnetico sintetico circolare e cambiare uniformemente l'angolo di passo, è ideale utilizzare una forma d'onda sinusoidale a gradini per il segnale di riferimento corrente di ogni avvolgimento di fase.
Prendendo ad esempio 8 suddivisioni di un motore passo quattro fasi, 7 stati intermedi stabili sono inseriti in ogni fase. Dopo la suddivisione, la corrente di ogni fase sale o scende in passi di 1/4. L'angolo sarà completato da 8 gradini, e 8 suddivisioni dell'angolo di passo possono essere realizzate. Più suddivisioni sono maggiori, minore è il cambiamento di corrente, che riduce notevolmente le vibrazioni e il rumore del motore. Quando l'onda sinusoidale a gradini viene utilizzata per suddividere la corrente, più passi (cioè più suddivisioni), più vicina è la forma d'onda a un'onda sinusoidale, più piccola è la corrente a passo e più piccolo è l'angolo di passo. Questo riduce notevolmente il tasso di perdita di passo quando il motore passo è in funzione. Riduce il rumore e le vibrazioni del motore passo-passo quando è in funzione e fa funzionare il motore passo-passo più stabile ed è più facile controllare la scheda PCB.