ミリ波レーダ
PCB層:4 - 6の層
基板:RO 3003 +アイソレーター
PCB表面処理:浸漬銀
PCB銅の厚さ:1 oz
PCBカラー:緑、黒、白、赤、青
PCBテスト:はい
テキサス・インスツルメンツ
PCBAテスト:いいえ
ミリ波レーダー
76 GHz〜81 GHz FMCWミリ波センサ
ミリ波レーダは,過酷な環境条件下でも高精度距離,角度,速度精度で数cm〜数百mの物体を検出できるので,自動車や産業用の主なセンシング方法の一つである。
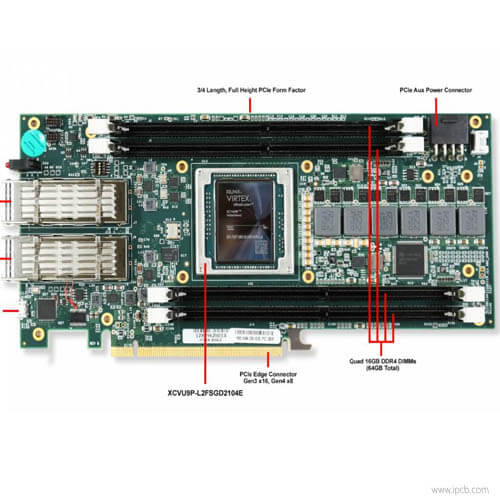
代表的 ミリ波レーダ レーダーチップセットと他の電子構成要素を含みます, 電力管理回路のような, フラッシュメモリ及び周辺インターフェース装置. 送信アンテナ及び受信アンテナはまた、PCB, しかし、高いアンテナ性能を達成するために, 高周波PCB材料, 例えば ロジャースRO 3003とIsola, 使用する必要があります.

ミリ波レーダのコア構成要素としては、トランシーバアンテナ(Tx&Rx)、無線周波数ユニット(RF)、アナログ−デジタル変換器(ADC)、デジタル信号プロセッサ(DSP)、マイクロコントローラ(MCU)等が挙げられる。
ミリ波レーダは主に24 ghz,60 ghz,77 ghz,79 ghzの4周波数帯を使用している。24 GHzは正確にセンチメートル波に属します。限られた測定距離(約60 m)と一般解像度のために、視野角範囲の広い視野において近距離障害物を検出する角度レーダとして設計されることが多い。60 GHzは特に大気の減衰に影響されるので、車両のバイタルサインや人員姿勢を検出するために重要な標識検出レーダとして設計されることが多い。前方距離遠距離知覚のための強力なツールである長距離測定距離(約200 m)のために,77 ghzと79 ghzが一次レーダとして設計されることが多い。これら2つのバンドは将来の車載ミリ波レーダ分野の主流バンドでもある。
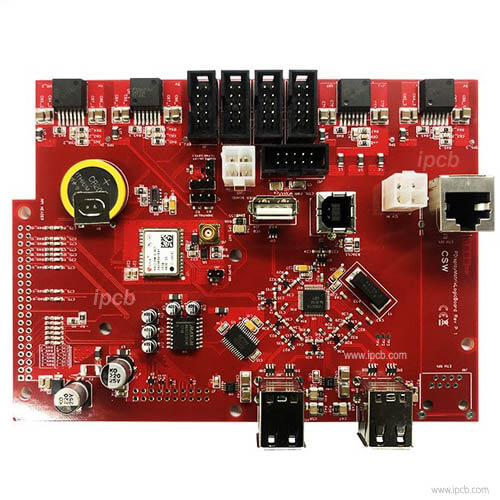
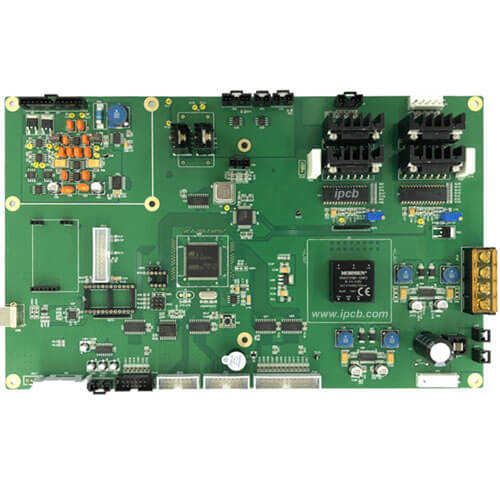
インダクタ、コンデンサ、ダイオード、パワーチップ等は、電源のマザーボードに密に立設されている。各企業は、一般的に、安全性コントローラを統合して、車両通信と安全関連機能を提供します。
レーダマザーボードは、アンテナ、RF、DSPおよび制御回路基板を含む、ミリ波レーダ全体のコアであると言える。

ミリ波レーダアンテナ
アンテナの長さが電磁波長の1/4になるとアンテナの送受信効率が最も高い。ミリ波の波長は数ミリであり、非常に小型にすることができる。アレーアンテナを形成するために複数のアンテナを用いることによって、狭いビームも達成することができ、狭いビームはより高い方位角分解能を意味する。
現在,ミリ波レーダアンテナの主流方式はマイクロストリップアレーである。最も一般的な設計は、マイクロストリップパッチアンテナを高周波PCB上に集積し、高周波PCBをレーダマザーボード上に集積することである。この方式はミリ波レーダのコストと体積を大幅に低減する。
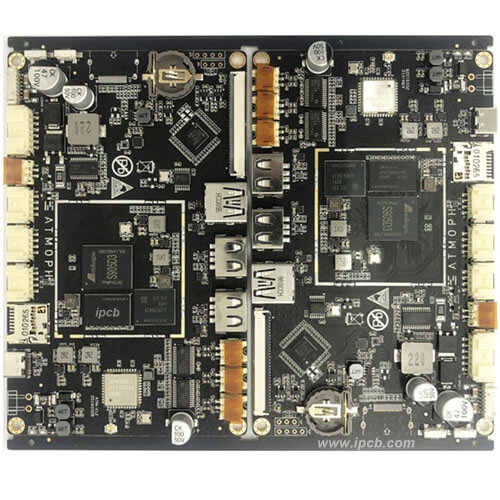
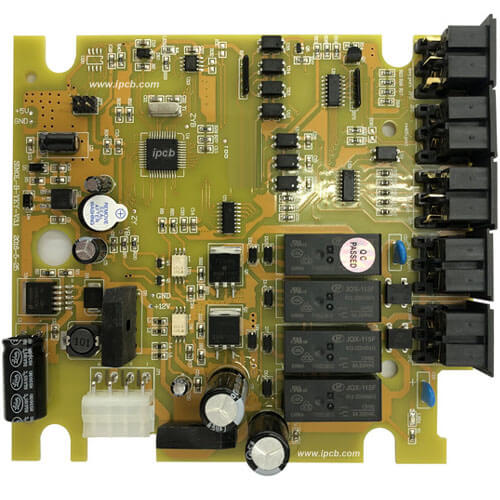
ミリ波レーダRF PCBA
RFは、信号変調、送信、受信及びエコー信号復調の原因である。ミリ波レーダのコアrf部分である。現在,mmic(モノリシックマイクロ波集積回路)技術により,上記内容を統合することが主流である。MMICは半導体技術による半導体基板上のパッシブ・アクティブ部品の製造技術である。
ミリ波レーダの分野では,シリコンゲルマニウム技術に基づくMMIC集積機能回路は,主に低雑音増幅器,電力増幅器,ミキサ,検出器,変調器,電圧制御発振器,移相器,スイッチなどを含む。送信機、受信機、DSPはすべて独立した単位であり、ミリ波レーダ複合体の設計プロセスと全体的な体積が比較的大きい。
coms技術の発展に伴い,mmicは小型化し,一方dspとmcuとの集積化のための技術的可能性を提供する。2016年の終わりに、TiはCMOS技術に基づく高集積77 GHzのミリ波レーダAWA 1642を開始しました。
ミリ波レーダ
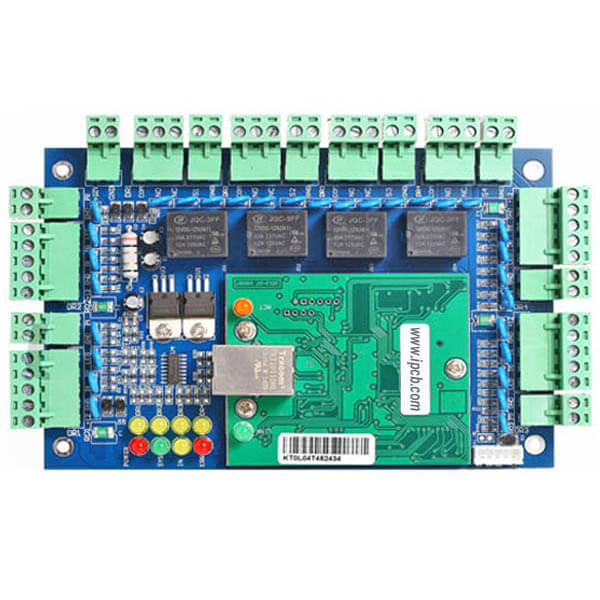
異なる信号処理アルゴリズムを埋め込むことによって、DSPは抽出物を特定のタイプの標的情報を得るためにフロントエンドから集めた場合、抽出する。dspはミリ波レーダの安定性と信頼性の中心である。
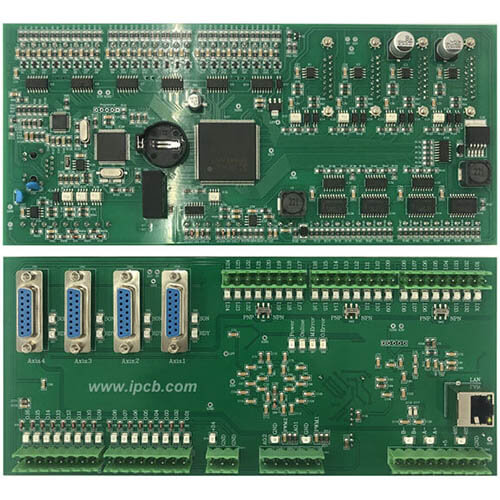
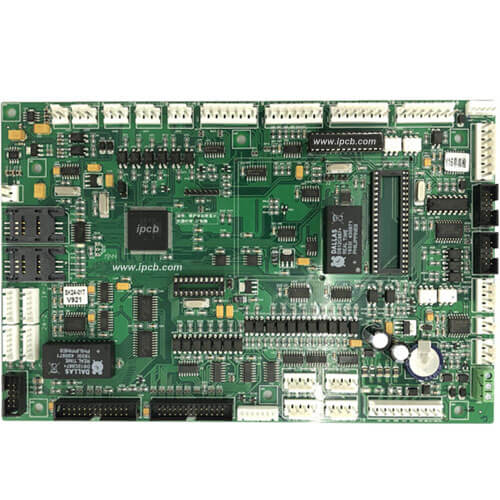
ミリ波レーダPCBAの制御回路
ミリ波レーダの制御回路は、DSPにより出力される目標情報と車体動的情報に従ってデータフュージョンを行い、最終的にメインプロセッサを介して判定処理を行う。
電磁波放射の異なる方法によれば、ミリ波レーダは主に2つのタイプに分けられる。
パルス波技術は,ミリ波レーダが短時間でピークパワーを持つ短いパルスを伝送し,ドップラー周波数とtof原理に基づく物体速度と距離測定を実現し,平行受信アンテナで受信した同じターゲットで反射したパルス波の位相差に基づく角度測定を実現する。高いパワーのため,大きなクラッタの背景において,長距離での小振幅の移動目標を検出することができる。しかし、それはまた、高コスト、高容量、高消費電力の欠点をもたらします。現在,この方法は車載ミリ波レーダではほとんど採用されていない。
連続波技術は、FSK(周波数シフトキーイング、単一の目標の距離と速度を測定することができます)、CW(一定の周波数連続波だけでなく、距離測定のために使用することができます定周波数連続波)とFMCW(周波数変調連続波)に分けることができます。その中でも,fmcwは,複数のターゲットの同時検出,高分解能,低コストの利点により,連続波技術の共通技術となっている。
ミリ波レーダ受信アンテナから送信された電磁波を受信した後、エコー信号及び送信信号を混合器に送信して混合する。送信された信号が測定された目標とリターンに遭遇すると、エコー信号の周波数は送信信号に対して変化した。ミキサの目的は、IF信号と呼ばれる送信信号とエコー信号との周波数差を計算することである。IF信号には、測定対象のレンジ秘密が含まれており、フィルタリング、増幅、アナログ−デジタル変換、周波数測定等の処理後に測定対象のレンジ情報を得ることができる。
速度測定のためには,ミリ波レーダで受信したエコー信号の位相は,測定したターゲットの距離が異なるために異なる。フレーム内のすべてのチャープ信号を等間隔でサンプリングし、サンプリング点のデータをフーリエ変換し、位相差を用いて測定対象の速度を測定する。
角度測定のために、多重受信アンテナは、同じエコー信号を受信して、角度測定をなしとげるためにエコー信号間の位相差を計算するために用いる。

3次元ミリ波レーダ
ミリ波レーダは距離,速度,角度情報を出力することができる。そして、この距離dと角度は、平面極座標系のレーダーを搭載した自車のデータである。極座標系をデカルト座標系に変換することにより,目標車両から自走車までの距離をx方向とy方向に得ることができる。このとき、次元のz方向の距離が見つからないことがわかります。これは、3 Dミリ波レーダの欠点の一つでもある。
しかし、この欠点は静的オブジェクトに致命的です。マンホールカバー、スピードバンプ、空中に吊るしている様々な標識、高架構造、固定車両などは、これらの障害物が高さ情報の不足のために交通に影響するかどうか、3 Dミリ波レーダによって決定することができません。静的なオブジェクトのために、メーカーは単純で、粗野です。これはテスラの以前の事故の理由の一つでもある。カメラは落ちた白い貨物車を特定しませんでした、そして、ミリ波レーダーはしました。しかし、意思決定に対する自信はあまりにも低く、車両が自動緊急自動機能を引き起こさない結果となった。
4 Dミリ波レーダ
4 dミリ波レーダの最も注目すべき特徴は,ピッチ角を正確に検出することができ,測定目標の真の高さデータ,すなわちデカルト座標系のz軸方向の目標物体の距離を求めることである。この特徴により,4 dミリ波レーダは静止物体を識別でき,最短の木材を追加した。さらに4 dミリ波レーダの分解能も大幅に向上した。水平・垂直解像度はそれぞれ1°°,2°°,水平分解能は通常3 dミリ波レーダの5〜10倍である。
ミリ波レーダ
PCB層:4 - 6の層
基板:RO 3003 +アイソレーター
PCB表面処理:浸漬銀
PCB銅の厚さ:1 oz
PCBカラー:緑、黒、白、赤、青
PCBテスト:はい
テキサス・インスツルメンツ
PCBAテスト:いいえ
ミリ波レーダー
76 GHz〜81 GHz FMCWミリ波センサ
PCB技術の問題については、IPCB知識サポートチームは、すべてのステップをお手伝いしてここにある。また、リクエストすることができます PCB 引用。お問い合わせメール sales@ipcb.com
我々は非常に迅速に対応します。