This application note aims to provide design layout guidance for the structure and layout of various PCBs (printed circuit boards) (such as FR4, flexible PCB or ITO panels) used in the design of S-TouchTM capacitive touch sensing.
Unter den derzeit auf dem Markt erhältlichen Leiterplattensubstraten, FR4 ist die am häufigsten verwendete. FR4 ist ein glasfaserverstärktes Epoxidharz Laminat, und die Leiterplatte kann einlagig sein oder mehrschichtige Leiterplatte.

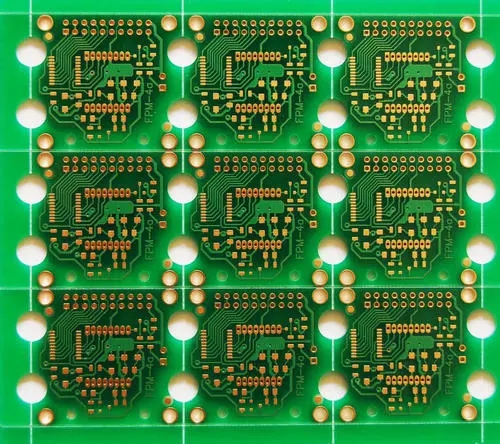
Wenn die Größe des Touchmoduls begrenzt ist, ist es nicht immer möglich, eine einlagige Leiterplatte zu verwenden, und normalerweise wird eine vierschichtige oder zweischichtige Leiterplatte verwendet. Wir werden Leiterplattenlayout-Richtlinien am Beispiel der am häufigsten verwendeten zweilagigen Leiterplatte vorstellen.
PCB-Design and layout
In a two-layer PCB, Der S-TouchTM Touch Controller und weitere Komponenten sind auf der unteren Schicht des Leiterplatte, und die Sensorelektroden sind auf der obersten Schicht der Leiterplatte angeordnet.
Der für jeden Sensorkanal erforderliche Abstimmkondensator kann direkt auf der unteren Schicht der Sensorelektrode angeordnet werden. Es ist darauf hinzuweisen, dass der S-TouchTM Touch Controller auf der unteren Schicht angeordnet ist und darauf geachtet werden sollte, dass keine Sensorelektroden auf der entsprechenden Oberschicht angeordnet sind. Die leeren Bereiche auf der oberen und unteren Schicht können mit geflochtener Kupferfolie gefüllt werden.
Konstruktionsvorschriften
Die erste Etage (oberste Schicht)
Die Sensorelektrode befindet sich auf der obersten Schicht der Leiterplatte (das obere Ende der Leiterplatte ist mit der Overlay-Platine befestigt). Um die Empfindlichkeit zu erhöhen, wird empfohlen, eine Sensorelektrode mit einer Größe von 10 x 10 mm zu verwenden. Eine kleinere Sensorelektrode kann verwendet werden, aber die Empfindlichkeit wird reduziert. Gleichzeitig wird empfohlen, dass die Größe der Sensorelektrode 15 x 15 mm nicht überschreitet. Überschreitet die Sensorelektrode diese Größe, verringert sie nicht nur die Empfindlichkeit, sondern erhöht auch die Störanfälligkeit.
Der leere Bereich kann mit geerdeter Kupferfolie gefüllt werden (die Spurbreite beträgt 6 mils und die Gittergröße beträgt 30 mils).
Die oberste Schicht kann verwendet werden, um gemeinsame Signalspuren (ohne Sensorsignalspuren) zu verlegen. Die Sensorsignalspuren sollten so weit wie möglich auf der unteren Schicht verlegt werden.
Der Abstand zwischen der Sensorelektrode und der Erdungskupferfolie sollte mindestens 0,75 mm betragen.
2.Stock (unten)
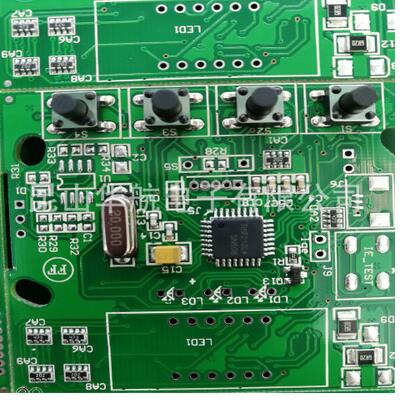
S-TouchTM Controller und andere passive Komponenten sollten auf der unteren Schicht ausgelegt und ausgelegt werden.
Die Sensorsignalspur wird auf der unteren Schicht angelegt. Führen Sie die Sensorsignalspuren eines Kanals nicht unter die Sensorelektroden anderer Sensorkanäle.
Der leere Bereich kann mit geerdeter Kupferfolie gefüllt werden (die Spurbreite beträgt 6 mils und die Gittergröße beträgt 30 mils).
Der Abstand zwischen der Sensorsignalspur und der Erdungskupferfolie sollte mindestens doppelt so breit sein wie die Sensorsignalspur.
Um Übersprechen zu reduzieren, sollte der Abstand zwischen den beiden Sensorelektroden/Sensorsignalspuren so weit wie möglich erhöht werden. Fügen Sie, wo möglich, geerdete Kupferfolie zwischen die beiden Sensorelektroden/Sensorsignalspuren hinzu.
Die Länge der Sensorsignalspur muss nicht exakt gleich lang sein. Durch die Verwendung von passenden Tuning-Kondensatoren kann die Eingangskapazität zwischen den beiden Kanälen ausgeglichen werden. Wenn es der Leiterplattenraum erlaubt, verwenden Sie am besten Sensorsignalspuren gleicher Länge (die Größe der Sensorelektroden ist ebenfalls einheitlich). Auf diese Weise muss nur ein Standard-Referenzkondensator eingestellt werden, um die Sensorkapazitiven Reaktanzwerte aller Sensorkanäle innerhalb des Dynamikbereichs der Controller-Sensorerfassung anzupassen, was die Konstruktionsschwierigkeit vereinfacht.
Takt-, Daten- oder periodische Signalspuren sollten nicht parallel zu und neben den Sensorsignalspuren verlegt werden. Diese Signalleitungen sollten so senkrecht wie möglich zu den Signalspuren des Sensors oder in anderen Bereichen der Leiterplatte angeordnet sein.
Wenn Takt, Daten oder periodische Signalspuren parallel zu den Signalspuren des Sensors geführt werden müssen, sollten sie auf verschiedenen Schichten angeordnet sein und sich nicht überlappen können, und die Länge des parallelen Teils der Signalspuren sollte so weit wie möglich verkürzt werden.
Erdung Kupferfolie
In der vorherigen Einführung zur zweilagigen FR4-Leiterplatte wurde die geerdete Kupferfolie verwendet, um den leeren Querschnittsbereich der Leiterplatte zu füllen. Die Erdungskupferfolie kann dem Touchmodul helfen, die externe Rauschquelle abzuschirmen und kann auch die inhärente Kapazität der Sensorschaltung stabilisieren.
Es gibt jedoch mehrere Punkte, die bei der Verwendung geerdeter Kupferfolie im Voraus beachtet werden müssen. Denn die geerdete Kupferfolie erhöht die inhärente Kapazität des Sensors und erhöht auch die Möglichkeit einer Fehlerkennung durch Wassertropfen.
Erdung Kupferfolie Design Guide:
Es wird empfohlen, statt massiver Erdungskupferfolie eine Mesh-Erdungskupferfolie zu verwenden. Es wird empfohlen, eine 20% Maschendraht geschliffene Kupferfolie zu verwenden (6° Spurbreite und 30° Maschendraht). Der Winkel der Erdungskupferfolie sollte auf 45° eingestellt werden.
Der Abstand zwischen dem Sensor und der geerdeten Kupferfolie sollte mindestens 0,5 mm betragen, und 0,75 mm wird empfohlen.
Der Abstand zwischen der Sensorsignalspur und der Erdungskupferfolie sollte mindestens doppelt so breit sein wie die Leiterbahn.
Bei einer vierlagigen Leiterplatte, wenn die Sensorsignalspur auf der dritten Schicht größer als 10 cm ist, um die kapazitive Last der langen Leiterbahn zu minimieren, wird empfohlen, keine geerdete Kupferfolie auf die untere Schicht zu legen.
Wenn einige leitfähige Materialien für die Verkleidung verwendet werden, wird empfohlen, keine geerdete Kupferfolie auf die Deckschicht zu legen.
Wenn das kapazitive Sensorsystem in einer feuchten Umgebung arbeiten muss, wird empfohlen, keine geerdete Kupferfolie auf die Oberschicht zu legen.
Beschreibung der Grundfunktion des Sensors und Leitfaden
Kapazitätssensorelektrode bezieht sich auf eine leitfähige Elektrodenplatte, die zur Messung der Fingerkapazität verwendet wird. Es wird mit der Eingangsklemme des Sensorkanals des S-TouchTM Controllers verbunden. Sensorelektroden können in verschiedenen geometrischen Formen und Größen hergestellt werden, um unterschiedliche Funktionen und Anwendungen zu haben.
Berührungstaste
Die Grundfunktion der Touch-Taste besteht darin, zu erkennen, ob ein Finger sie berührt. Der S-TouchTM Controller kann die Kapazität der Sensorelektrode des Touchtasters messen. Befindet sich der Finger relativ nah an der Touchtaste und überschreitet die gemessene Kapazitätsänderung einen voreingestellten Schwellenwert, wird das Auftreten einer Fingerberührung erkannt.
Die Touch-Taste kann in verschiedenen Formen, wie Quadrat, Kreis, Dreieck oder andere Formen gestaltet werden. Wenn die Größe der Leiterplatte begrenzt ist, sollte die Tastenform so gestaltet sein, dass sie die Raumnutzung maximiert, um die beste Empfindlichkeit zu bieten.
Für Anwendungen, die mit einer 2-3-mm Acrylkunststoffschale abgedeckt sind, wird empfohlen, eine quadratische Sensorelektrode mit einer Mindestgröße von 10 x 10 mm zu verwenden. Es wird empfohlen, die maximale Größe 15 x 15 mm nicht zu überschreiten. Überschreitet sie diese Größe, kann nicht nur die Empfindlichkeit verbessert werden, sondern auch die Störanfälligkeit erhöht werden.
Berühren Sie den Schieberegler
Die Grundfunktion des Touch Sliders ist die Erfassung der Gleitposition des Fingers in eindimensionaler Richtung.
Eine der typischen Anwendungen des Touch Sliders ist die Lautstärkeregelung. Zwei Methoden können verwendet werden, um den Touch Slider zu implementieren: Touch State Slider und Ratio Meter Slider.
Die quadratischen Touchtasten sind eng aneinander angeordnet, die als Touch-State-Schiebeleiste ausgeführt werden können.
Wenn erkannt wird, dass ein bestimmter Sensorkanal eingeschaltet ist, kann die Position des Fingers auf dem Touch Slider ermittelt werden. Im obigen Beispiel werden 5-Sensoren verwendet, um 9-Standorte zu erkennen. Wenn die Kanäle S1 und S2 gleichzeitig eingeschaltet sind, bedeutet dies, dass die Position des Fingers in Position 2 liegt.
Für Anwendungen, die mit einer 2-3-mm Acrylkunststoffschale abgedeckt sind, empfiehlt sich die Verwendung einer Sensorelektrode mit einer Mindestgröße von 10 x 10 mm. Der empfohlene Spaltwert zwischen den Schiebersensoren beträgt 0,75 mm. Der Spalt zwischen zwei benachbarten Sensorelektroden sollte 1 mm nicht überschreiten. Damit kann sichergestellt werden, dass, wenn der Finger genau im Spalt ist, die beiden Sensorkanäle gleichzeitig geöffnet werden können.
Der Vorteil des Touch State Sliders ist sein einfaches Design und seine hohe Stabilität in einer lauten Umgebung. Wenn jedoch eine große Anzahl von Standorten benötigt wird, kann diese Methode nicht implementiert werden, da zu viele Sensorkanäle benötigt werden.
Eine weitere Methode ist die Verwendung des proportionalen Dosierschiebers. Diese Methode wird nicht implementiert, indem der Berührungszustand auf jedem Sensorkanal erkannt wird, sondern indem die Position des Fingers anhand der genauen Änderung der Kapazität ermittelt wird, die von jedem Sensorkanal gemessen wird. Wenn die genaue Kapazitätsänderung jedes Sensorkanals gemessen wird, wird durch Berechnung des Verhältnisses die genaue Position des Fingers ermittelt.
Eine Fingerberührung in der obigen Position bewirkt eine Erhöhung der Kapazität der drei Sensorkanalelektroden. Aufgrund des Unterschieds in der vom Finger abgedeckten Fläche ist auch der Kapazitätswert der einzelnen Sensoren unterschiedlich. Durch die Verarbeitung der Rohkapazitätsdaten des Sensors kann dann die absolute Position des Fingers auf dem Schieber ermittelt werden.
Touch Spinner
Wie der Schieber wird auch der Touch-Rotator basierend auf der Touch-Zustands- und Verhältnismessmethode implementiert.
Der Spinner, der die Touch State Methode anwendet, bestimmt die Position des Fingers, indem er den Zustand jedes Sensorkanals überprüft. Der Rotator, der das proportionale Messverfahren verwendet, bestimmt die Position des Fingers, indem er die genaue Kapazität jedes Sensorkanals misst, der durch Berührung des Fingers erhöht wird. Wenn ein Finger auf dem Spinner rollt, erhöht sich die Kapazität mehrerer Sensorkanäle. Dann kann durch Berechnung des Kapazitätswerts, der durch diese Sensorkanäle hinzugefügt wird, die genaue Position der Fingerberührung berechnet werden.
Die Stabilität des Touch-Rotators zur Fingerberührungserkennung hängt von der erforderlichen Auflösung und der Anzahl der Sensorkanäle ab. Für einen hochauflösenden Touch-Rotator müssen möglicherweise mehr Sensorkanäle anstelle von nur drei Sensorkanälen verwendet werden.
Sonstige Erwägungen
Befolgen Sie diese grundlegenden Designrichtlinien für PCB-Design und Layout können kapazitive Sensoranwendungen zuverlässiger machen. In PCB-Design, andere wichtige Faktoren sollten berücksichtigt werden, einschließlich:
. Diere is no floating plate/Polarplatte auf der Leiterplatte. Der leere Bereich der Leiterplatte kann mit geerdeter Kupferfolie gefüllt oder leer gelassen werden.
Die Leiterplatte sollte so ausgelegt sein, dass der erforderliche Referenzkapazitätswert kleiner als 20 pF ist (der Referenzkapazitätswert wird während der Hardwareeinstellung bestimmt), und die inhärente Kapazität jedes Kanals sollte kleiner als 10 pF sein. Wenn dieser Wert größer ist, müssen Sie einige grundlegende Layouts ändern, z. B. die Dichte der Erdungskupferfolie verringern, den Abstand zwischen der Sensoreingangsstrecke/Elektrode und der Erdungskupferfolie erweitern, die Breite der Sensorsignalspur verringern oder sogar die Erdungskupferfolie entfernen. Wenn der maximale Wert der Sensoreingangskapazität 10 pF überschreitet, müssen Sie einen Tuning-Kondensator für die Anpassung der Einstellungen verwenden.
Versuchen Sie, die Differenz in der inhärenten Kapazität zwischen jedem Sensorkanal innerhalb von 10 pF zu kontrollieren (diese Differenz kann während der Hardwareeinstellung gemessen werden). Wenn es 10 pF überschreitet, ist es notwendig, die Abweichung zwischen der Spurenlänge und der Sensorelektrodengröße zu verringern, um die Differenz zu minimieren.
Installieren Sie Reihenwiderstände in den I2C SDA- und SCL-Leitungen, um Störgeräusche zu filtern, die durch den Kabelbaum verursacht werden, der das Motherboard und das Touchmodul verbindet, oder Störungen durch Stromrauschen, die zu einer Verzerrung des I2C-Signals führen können.