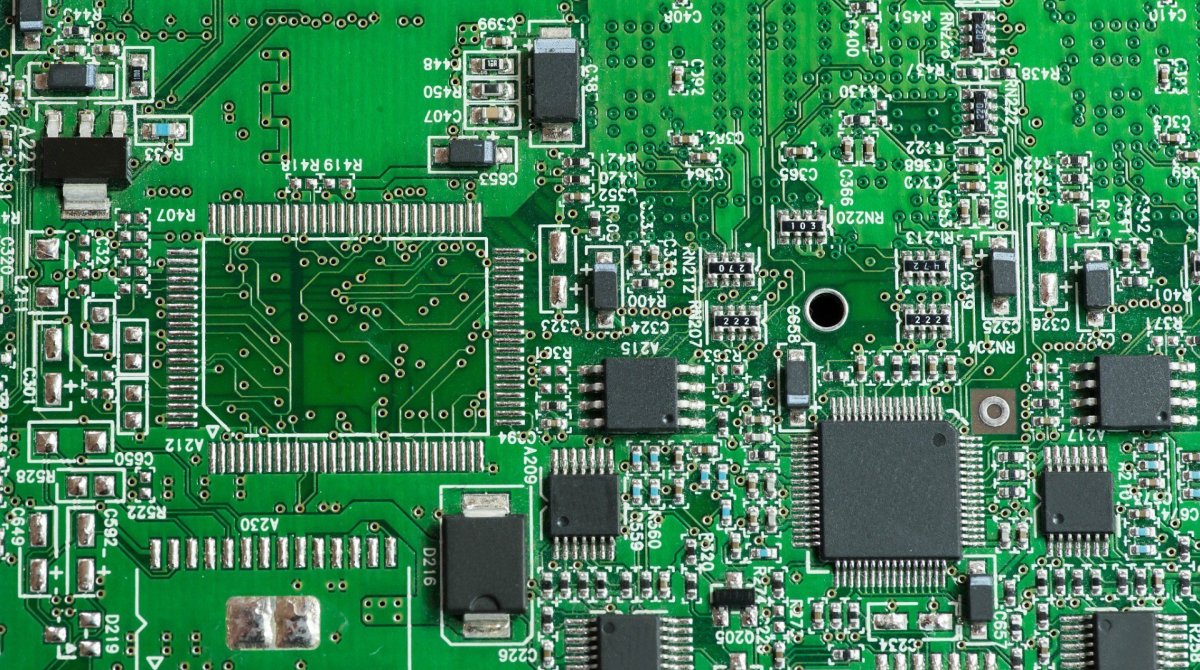
La machine d'inspection d'apparence de carte de circuit imprimé est un équipement d'inspection de qualité important sur la ligne de production de produits de carte de circuit imprimé. Il est basé sur les principes du traitement optique de l'image et de la technologie de reconnaissance visuelle par ordinateur. Sa fonction principale est de détecter les défauts d'apparence rencontrés lors de la production d'éléments de carte PCB. La Chine est un grand producteur mondial de cartes PCB, mais pas une puissance. Un lien important dans la chaîne de production de carte PCB - l'équipement et les instruments de carte PCB ne sont pas forts est l'une des principales raisons de cette situation. Afin de promouvoir le développement et le progrès de l'industrie de la carte PCB en Chine, par rapport à la machine d'inspection automatique de l'apparence, une machine d'inspection manuelle de l'apparence de la carte PCB avec une opération plus simple, un système plus compact et un meilleur rapport qualité - prix a été développée. La machine de détection d'apparence de carte PCB manuelle transfère automatiquement la carte PCB via le dispositif de transfert arrière de carte manuelle, la caméra CCD Line Array scanne uniformément la carte PCB pour obtenir une image précise. Le signal de contrôle de rétroaction trie automatiquement la carte PCB (OK / NG). Peut détecter les corps étrangers, le cuivre exposé, la réparation de l'huile, les rayures, le mauvais placage d'or, les mots faux, l'huile verte irrégulière, les Pads irréguliers, le cuivre résiduel, l'impression manquante, le développement et d'autres défauts d'apparence. Étant donné que la vitesse et l'effet de l'acquisition et du traitement des images auront un impact direct sur la précision et l'efficacité de la détection de la carte PCB, une étude détaillée du système d'acquisition d'images a été réalisée et c \ a été utilisé en fonction des caractéristiques de la machine d'inspection visuelle manuelle. NET Framework réalise un développement secondaire d'activemil et utilise la Bibliothèque d'interfaces graphiques GDI + pour le développement de systèmes logiciels d'acquisition d'images.

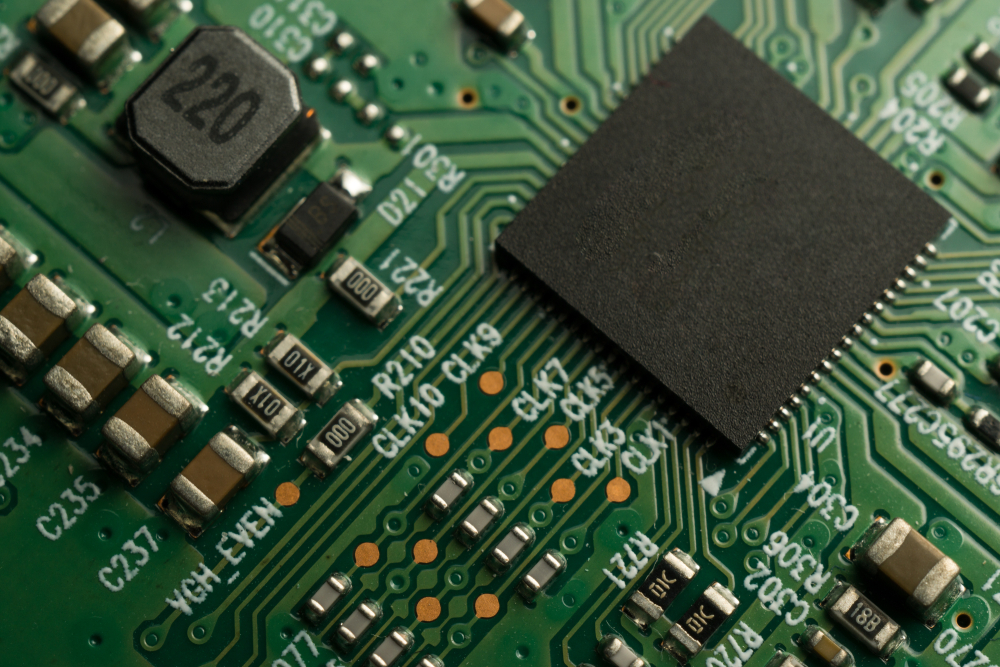
1. La structure globale du système de machine d'inspection d'apparence de carte PCB la structure du système d'inspection en ligne de carte PCB est complexe, son équipement de contrôle de transmission, son système de contrôle électrique et sa caméra doivent être contrôlés par ordinateur pour coordonner le travail de traitement et accomplir des tâches complexes de détection et de tri. La structure de l'équipement de détection en ligne de carte PCB est basée sur la vision industrielle et le système est principalement divisé en sections de contrôle de mouvement, d'acquisition d'image et de traitement d'image. La partie acquisition d'images est une partie importante de l'ensemble du système. La caméra et l'objectif sont l'équivalent de l'œil humain en vision industrielle et sont responsables de la capture d'images d'objets. La Section d'acquisition d'image est une partie importante du système de détection de carte PCB et constitue la base du traitement de détection. Le système de détection de carte PCB met l'accent sur la vitesse et la précision de la détection, de sorte que la Section d'acquisition d'images doit fournir des images claires et précises en temps opportun. Structure matérielle du système d'acquisition d'images 2.1 Principe de fonctionnement du système d'acquisition d'images lorsque le système est sous tension, le MCU détecte automatiquement si la table PCB est remise à zéro au point de départ. Ce processus est principalement effectué par deux capteurs à fibre optique et un servomoteur. Deux capteurs sont installés au début de la piste du moteur, c'est - à - dire au point de Réinitialisation et à la fin de la piste. Avec des fonctions de Réinitialisation, d'arrêt et d'inversion du moteur. Après la mise sous tension, le MCU détecte que le sesorl (point de Réinitialisation ou point de départ) n'est pas valide et appelle le Programme d'inversion du moteur pour ramener la table PCB à la position de départ, le port série envoie un signal d'annulation d'image couleur au PC, puis le MCU continue à juger Si une touche est enfoncée ou non. Si vous appuyez sur une touche et que le moteur commence à tourner vers l'avant, le port série envoie un signal valide d'image couleur au PC. Ce processus est également un processus de balayage de ligne de carte PCB pour compléter l'acquisition d'image. Dans ce processus, le moteur passe par trois phases: une phase d'accélération, une phase de vitesse constante et une phase d'arrêt de décélération. Au cours de la rotation du moteur vers l'avant, à partir de sept heures, le MCU compte les impulsions renvoyées par le codeur du servomoteur via l'unité de capture et de comparaison unique (ccu6), mais lorsque la valeur de comptage atteint la valeur effective de l'acquisition d'image, le port série envoie l'image acquise au PC. Le signal de démarrage, à ce moment - là, la matrice de lignes CCD commence à Imager la carte PCB. Lorsque le moteur ralentit vers l'avant jusqu'au capteur 2 à l'extrémité de la piste, le moteur s'arrête et s'inverse immédiatement pour revenir au point de départ. Dans ce processus, le port série envoie un signal invalide au PC. Jusqu'à présent, un processus de détection complet est terminé. Le MCU continue à détecter si le bouton est enfoncé pour la détection vers le bas. Parmi ceux - ci, le signal actif d'acquisition et le signal de démarrage émis par la porte série peuvent efficacement éviter un faux déclenchement. Le signal d'image acquis par le CCD est envoyé à la carte d'acquisition d'images via l'interface camrelink, puis est traité par le PC pour un traitement ultérieur de l'image. 2.2 réception et détection des capteurs et des boutons poussoirs l'isolation photoélectrique entre les circuits peut être obtenue en utilisant la technologie d'isolation par couplage optique, même si le signal d'entrée peut passer sans résistance, Empêcher la rétroaction du signal de sortie à l'entrée, propice à la suppression des pics et des interférences de divers bruits, travail stable, sans contact, longue durée de vie, efficacité de transmission élevée. Pour détecter le signal de vitesse de rétroaction du miroir rotatif en temps réel, cette conception utilise le couplage optique à grande vitesse acpl - 072l, le taux de transmission peut atteindre 25 MBD et le circuit périphérique est simple. La conception utilise le port cc25 de l'unité de capture / comparaison dans le périphérique xc164cs, Et utilise le signal de transmission de couplage optique comme signal d'interruption externe pour déclencher le xc164, ce qui permet un positionnement rapide du capteur et une détection des boutons. 2.3 système de caméra CCD le système d'acquisition d'images de cette machine manuelle de détection d'apparence de carte PCB utilise la caméra à balayage linéaire couleur 3ccd nucli7300 de la série Ned Rainbow. Cette caméra a une large gamme d'applications et peut effectuer une détection d'aberration chromatique qui était auparavant impossible avec les caméras noir et blanc. L'interface externe est une interface série à haute vitesse (Camera Link) qui peut être facilement connectée à la carte de capture et qui permet également de régler facilement le gain et le décalage, ainsi que de corriger le retard de la ligne RGB. Le nombre de pixels est de 7 300x3 Line, la taille des pixels est de 10x10 Isla ¼ M, le débit de données est de 60 MHz et le taux de balayage Court est de 7,6 kHz. La carte d'acquisition d'images dans le système est le soliosxcl - su74 de Matrox, qui a son propre processeur pour gérer deux modes de base indépendants ou une configuration Camera Link en mode moyen, le taux d'acquisition de 66 MHz, 64 Mo de mémoire tampon et peut acquérir des tableaux de zones. Et une caméra à balayage linéaire avec plusieurs modes d'acquisition. Actuellement, la plupart des systèmes de détection d'images sur le marché utilisent des caméras areascan (areascan) pour collecter et analyser les images. Mais parce que cette machine d'inspection d'apparence de carte PCB détecte une large gamme de tailles de produits de carte PCB - 50 mmx50 mm ~ 330 mmx250 mm, la précision est élevée. La résolution et la vitesse d'acquisition de l'image de la caméra à balayage de zone ne répondent pas à ces exigences, le système a donc opté pour un CCD à balayage linéaire. Mais le système de détection à balayage linéaire doit utiliser la vitesse de déplacement pour obtenir une ombre de zone, c'est - à - dire que lorsque la carte PCB testée se déplace dans le champ de vision de la caméra, le matériel envoie un signal de déclenchement à la caméra pour commencer l'acquisition, de sorte que le mode d'acquisition de la carte d'acquisition est réglé pour que le matériel déclenche l'acquisition synchrone et alloue 64 m de mémoire interne. Composition du système logiciel le langage de développement utilisé par le logiciel du système d'acquisition d'images est C \, le kit de développement logiciel est t